見せてもらおうか! PID auto-tuneの性能とやらをぉぉ!!
ということで、SimpleBGC32bit最新版の 2.42b6ファームで実装されたPID auto-tuneという機能、これがなかなかいい感じだったので軽くエントリ。
PID auto-tune、その名の通りPID値を自動で設定してくれる便利機能。
AUTO PID機能が実装されてるFCも既にありますし、DJIの3AXISジンバルRONINも自動チューニング機能があるようなので、先駆者たるAlexmosが遅れをとってる感はあるけれども…
2.42b6で日本語にも対応したので、日本語表示にして早速PID auto-tuneをお試し。
ちなみに下の画像はIMP 3AXIS現状の設定値。
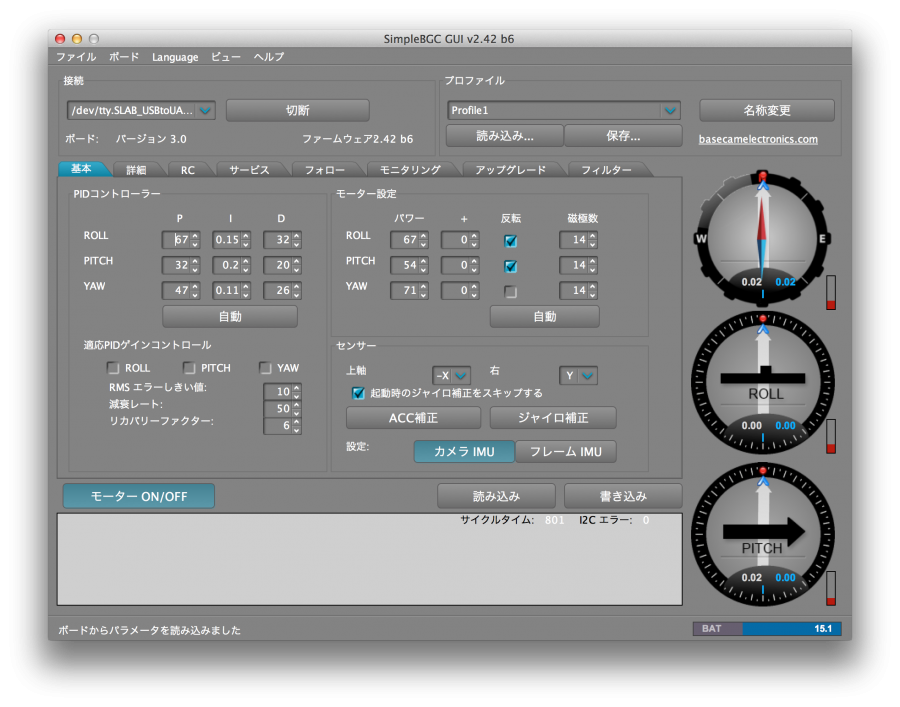
PID auto-tuneを使うには、センサーキャリブレーション、モーター設定(Motor Config.)が正確である事が前提。
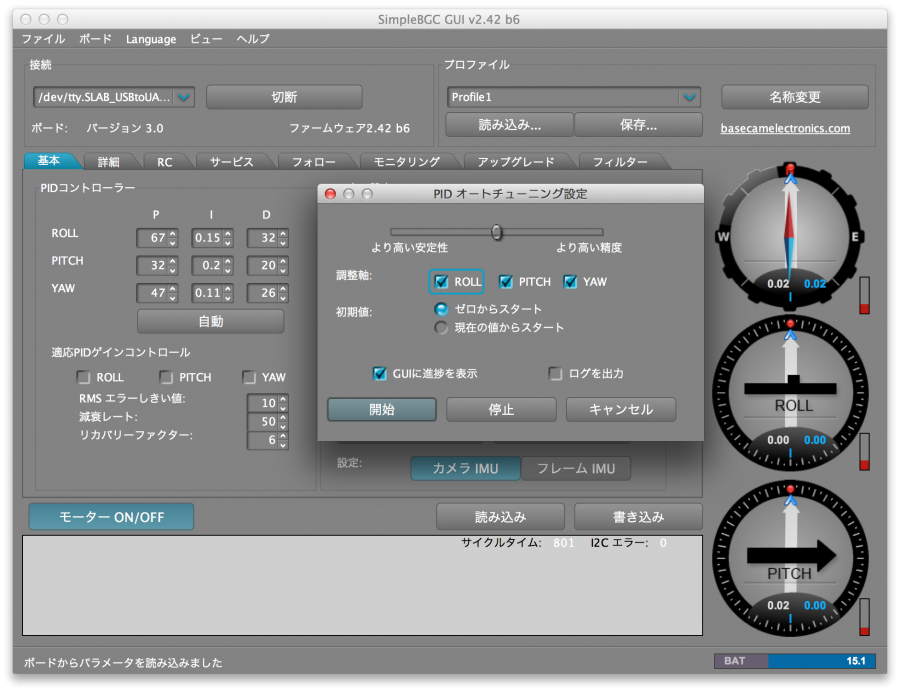
PID値をどうするのか、Better Stability(より高い安定性)⇄Better Persision(より高い正確性)をスライダーで設定。
Better Persision(正確性)はマックスのGain値にチューニング、Better Stability(安定性)ではマックスGain値から30-50%程下げた値で動作の信頼性を上げる設定との事。
となると、Better PersisionでマックスのGainに寄せといて、Adaptive control of PID gainsで細かく追い込むのもアリな気がする。
“ゼロからスタート” も “現在の値からスタート” も結果には関係ない雰囲気。
今回はセンターにセットしたものとBetter Stability(より高い安定性)に振った、2パターンでお試し。(いずれもゼロからスタート)
設定中ジンバルはジワジワと微妙に動き、PIDの数値が上下して2分-3分程度で設定完了。
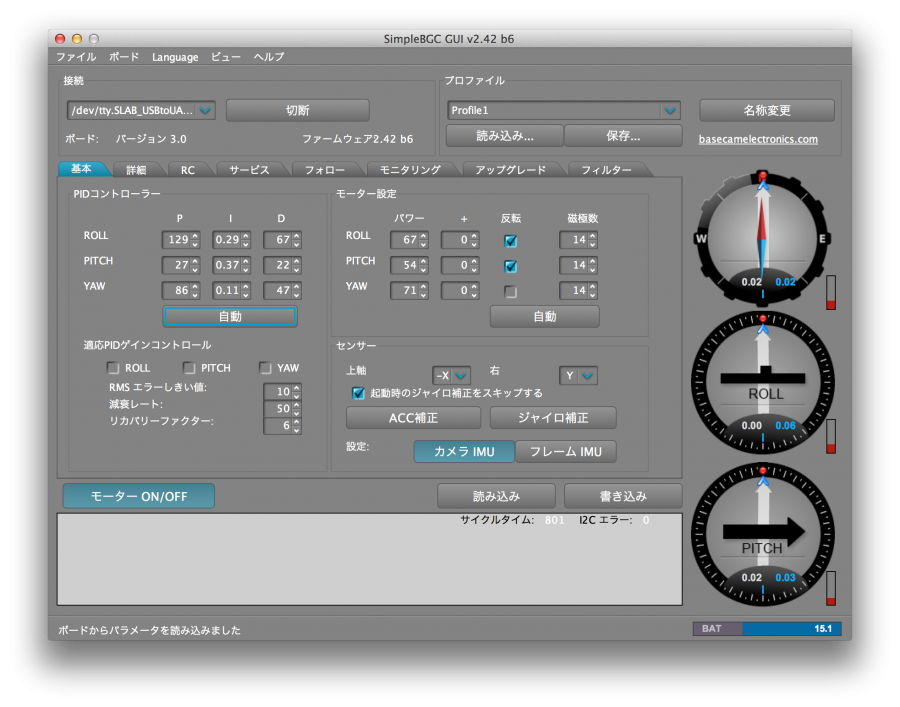
Better Stability⇄ Better Persisionを50%

自分の設定はかなり数値を抑えていた方だと思うのだけど、それにしても一気に2倍程度に数値が上がりました。
ここまで上げて良いんだ!?という驚きながら、グリグリしてみると、かなりガッチリな感はあるものの動作はいい感じ。
続きまして
最Better Stability側へセット
PID度合いをセンター設定にして出た値にたいして、8割程度の結果。なぜかPitchはかなり低くなりましたね…。
こちらもグリグリした感じではバッチリ安定してます。
PID全体のバランスが崩れなければ、設定値としての懐はだいぶ広いんですね。
何度かPID auto-tuneを繰り返してみたけど、数値は有る程度バラつきます。
AUTOセッティング中はジンバルにテンションを掛けないように、USBで接続する場合はなるべく細めのケーブルで、できればBTが良ろし。
(Menu ButtonにPID auto-tuneを割り当てられました)
一発で安定動作する設定値が出る(すくなくともボクの環境では) PID auto-tune機能はこれからジンバルを弄り始める人や、PIDの迷宮に迷い込んでる人にはとっては素晴らしい機能と思います。
とはいえ、ずっと言ってますが、PID auto-tuneも “センサーのキャリブレーション精度” と “ジンバルの精度” が満たされていてこそ。
何度かPID設定等の質問メールを貰ったことがあるけど、皆さんセンサーキャリブやジンバルのバランスが甘い感じで、そこが抜けててはいくらPID弄っても煮詰まらないというね。
とりあえず、50%で出た数値でフライトテストしてみよう。
2 Comments
ハスラー
2014-08-17 at 6:58 PM>何度かPID設定等の質問メールを貰ったことがあるけど
あ!呼ばれた♪
ご無沙汰しております、その節はお世話になりましたw
バージョンによってはロールがおかしくなる旨の記事を見かけましたが、自分の32bitはおかげさまで問題なく動いてます!!
この記事を拝見してすぐにファームアップデートしましたが、PID自動設定良いですね〜
自分も設定値よりも高めの結果となりましたが、動作は安定してますです。
hightimes247
2014-08-18 at 12:54 AMどうもです!
AUTO PID良いですねぇ。
Gainのおおよそのマックス値が分かったのが収穫でした。
Powerによって変動するんでしょうけど、もう少しAUTO PIDイジイジして探ってみま〜す。
>バージョンによってはロールがおかしくなる
そうなんです?ジャイロキャリブが上手くいってないのかな…
ぼくは気になった事ないです。
それにしても、やっぱりSimpleBGC-32bitはH3-3Dより滑らかに感じますね。
システムとしての簡易さは絶対にH3-3Dなんですけど…